摘要:工件校准可使软件中机器人与工件的相对位置与实际环境中机器人与工件的相对位置保持一致,从而方便进行后续的工作。
工件校准位置:位于【机器人编程】下的【工具】中。

图示:“校准”位置
说明:工件校准,确保软件的设计环境中机器人与零件的相对位置与真实环境中两者的相对位置保持一致。校准方法有两种:三点校准法、点轴校准法。
v这里的校准功能还可以对外部工具进行校准,方法与校准工件完全一致。
l三点校准法:通过拾取三个尖点来校准零件/外部工具相对于机器人的位置。
l点轴校准法:通过拾取一个轴和一个点来校准零件/外部工具相对于机器人的位置,一般用来校准没有足够数目尖点(小于3)的零件。
n目前,工件校准有两种情况:
一,工件在机器人的外部,与机器人无接触,此时应选择基坐标系;
二,机器人手持工件,配合外部工具,此时应选择法兰坐标系。

图示:工件校准两种情况
v两种场景的校准原理、校准步骤都是完全相同的,只有坐标系选择上的区别。
n校准界面说明

图示:三点校准法界面
*界面图中的“说明”为校准操作的具体步骤。
v注意:选取的三个点不共线。设计环境中指定的三个点要和真实环境中测量的三个点位置保持一致。
l坐标系:工件位置所参考的坐标系。这里的坐标系包括基坐标系和法兰坐标系。
基坐标系:固定在机器人足内,用来说明机器人在世界坐标系中的位置。
法兰坐标系:固定于机器人的法兰盘上,是工具的原点(一般常见的法兰坐标系都是Z轴朝外,X轴朝下)。
l模型:应选择当前需要校准的工件。
l设计环境:RobotArt软件中的绘图区。
l真实环境:真机操作环境。
l导入:将保存在txt文件内的真实环境中测量的数据导入到软件中。
l保存:输入真实环境中测得的三个点数据后,将其保存到文件中(txt),方便下一次读取数据。
l预览:源位置预览:预览校准前的工件位置(以坐标系表示在绘图区中)
目标位置预览:预览校准后的工件位置(以坐标系表示在绘图区中)
示例
以一个ABB机器人写字为例,校准机器人与写字板的相对位置。
校准前后机器人与零件的相对位置如图所示:
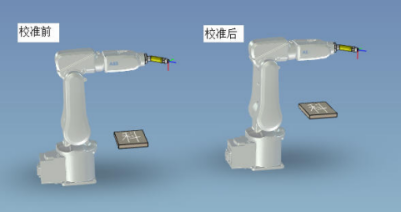
图示:工件校准前后的对比
拾取点的过程如下:

图示:工件校准步骤
点轴校准法相比三点校准法,本质是一样的。两点确定一个轴,外加一个校准点,也刻意确定一个面,只是这个面的反正不好确定。因此,在实际校准时需要借助“轴翻转”功能做进一步调整。
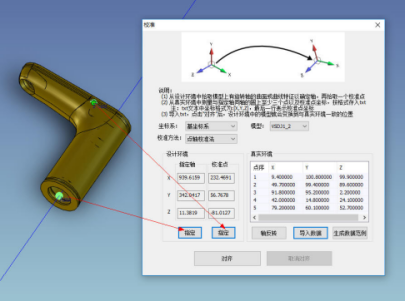
n点轴校准法界面

图示:点轴校准法界面
l点的指定:“指定轴”下的X Y Z指的是该条轴坐标系三个方向上的向量,在零件上指定时应选择与轴垂直的一个圆环或者曲面。此时确定的是轴的位置,不包括方向。
校准点可选择零件上的任意一点。
l导入轴数据:将实际环境中测得的轴数据文件导入,文件格式为txt,不支持手动输入,节省了录入数据时间。
l轴反转:输入虚拟环境和真实环境中的数据后,点击【对齐】,可看到校准后的效果。若发现轴向与预期的不一致,点击【轴反转】即可。“轴反转”即确定了轴的方向。
l生成数据范例:将真实环境中的轴数据和点数据生成txt文件导出,以便对其进行查看。
v真实环境内采集的用来确定轴的点(至少三个),必须来自于与轴线共轴的圆柱端面边线或圆孔边线上采集;
v设计环境内,拾取的校准点,注意不要和轴线相交。
示例
以打磨水龙头为例,校准过程如下:
图示:点轴校准法过程
关键字: 工件校准

















 010-89755166转810
010-89755166转810


