摘要:“后置”功能将在软件中生成的轨迹、坐标系等一系列信息生成机器人可执行的代码语言,可以拷贝到示教器控制真机运行。
基本后置介绍及流程
位置:位于【机器人编程】下的【基础编程】中。
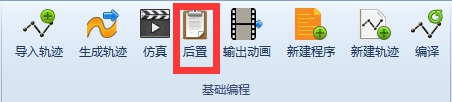
图示:“后置”位置
说明:“后置”功能将在软件中生成的轨迹、坐标系等一系列信息生成机器人可执行的代码语言,可以拷贝到示教器控制真机运行。
n 后置处理界面介绍
单击基础编程中的【后置】,弹出“后置处理”的对话框:
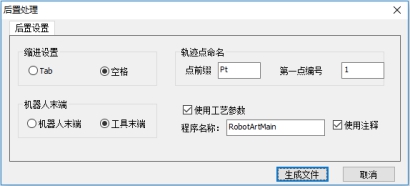
图示:后置处理界面
l 缩进设置
缩进设置主要是编辑后置文件的格式,这个一般选择默认的【空格】。
l 机器人末端后置和工具末端后置
这两个是选择输出的代码以机器人末端坐标(法兰坐标系)为准还是以工具末端坐标为准。
l 轨迹点命名
轨迹点命名由前缀和编号组成,这个根据个人喜好进行设置,一般也会选择在这个界面选择默认的选项。
点的编号:后置的起始编号可根据需求设定,可以是0/1,也可以是其他。
l 程序名称
程序的名称可自行输入和修改。一般来说,该名称为示教器所识别的模块名称。
l 使用注释
注释是指解释代码语言的文字。
是否使用注释根据需要设定。
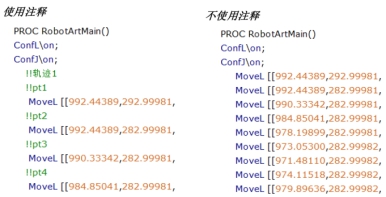
图示:“使用注释”对比图
n 后置代码编辑器
点击【生成文件】后,弹出后置代码编辑器,生成的代码如下:
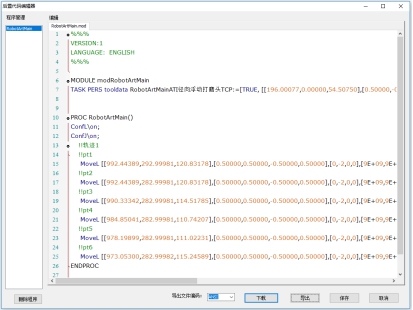
图示:后置代码编辑器
不同的机器人后置会生成不同的文件格式.KUKA机器人会后置出两个文件:DAT/SRC.其他机器人会后置出一个后缀为mod的文件。
l 后置代码的显示方式:点的坐标、字符和注释用不同颜色区别开来,代码查看起来清晰明了。
l 有行号显示,方便定位某一行的代码。
l 折叠功能,同一组别或者段落的代码可以实现手动折叠展开和收起。
l 提示功能:输入轨迹点指令的首字母,会提示出MoveL,MoveC等字样。完整的轨迹点指令+[ 会提示出相关指令的参数格式。(目前支持的是ABB机器人)
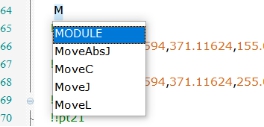
图示:提示功能1
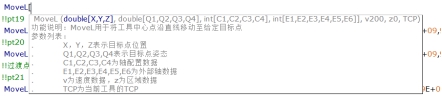
图示:提示功能2
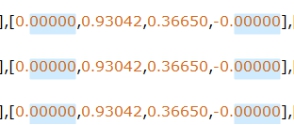
l 高亮显示:选中某个字符后,所有相同的字符以蓝底高亮显示。
l 导出文件编码:包括ANSI和UTF-8两种编码。ANSI编码不支持代码程序中包含中文字符,UTF-8则允许包含中文字符,从而根据特定品牌的机器的后置需求来选择这两种编码。
ANSI详细讲解:ANSI
UTF-8详细讲解:UTF-8
l 导出:将后置出的文件直接拷贝到真实示教器,从而完成真机的运行。
保存:后置代码会保存在编辑器中。
v 后置格式的具体显示样式,如字体颜色、背景色、折叠方式等都用XML控制。
因此,用户可依据实际需求,自定义后置的具体显示样式。
关键字: 程序后置

















 010-89755166转810
010-89755166转810


