摘要:简单给大家解释一下,KUKA示教器内坐标系和工具列表内的$nullframe 代表什么意思
KUKA示教器内坐标系和工具列表内的$nullframe 代表什么意思?
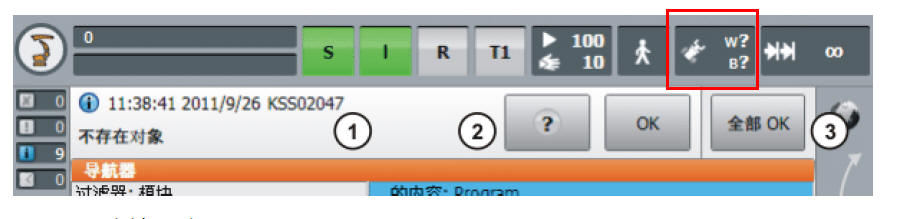
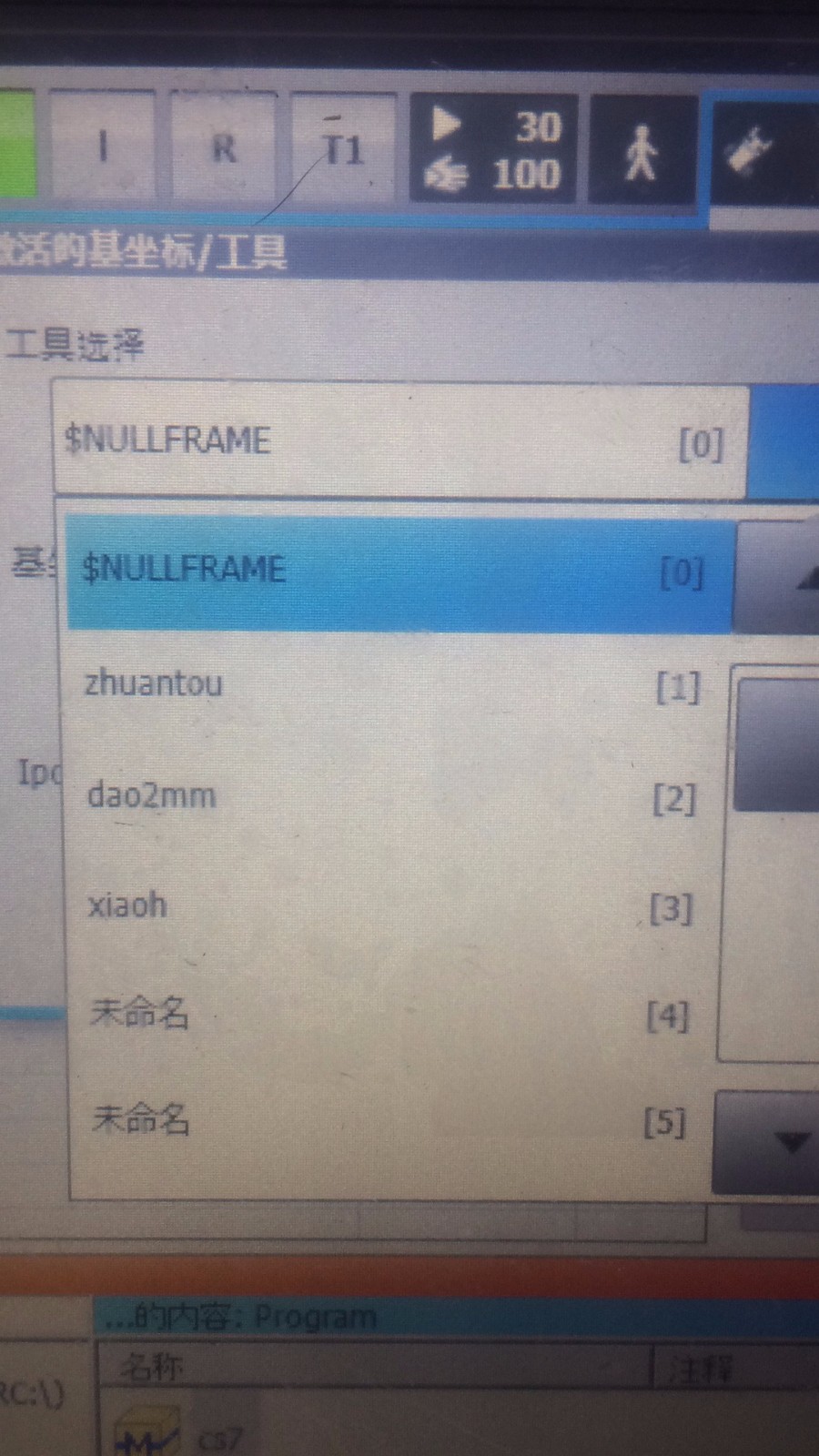
在KUKA (库卡)的示教器右上角,有一个当前工具和坐标系选择设置图标, 打开后,工具和坐标系都提供了一列坐标系数组让大家选。
2. 这些坐标系的参数及其名字,可以事先在示教器的“投入运行 > 测量 > 工具 > XYZ 4 点” 和 “投入运行 > 测量 > 基坐标系 > 3 点”把自定义的工具和坐标系定义一下。详细请看“01-库卡机器人编程 1.pdf”第三章内容
3. $nullframe 这个参数在在base 和tool 坐标系下各有一个,拆开名字mull +frame 组成,null 就是 0 或者空的意思,frame 就是一个坐标系结构的意思; 在坐标系内他表示base【0】,代表的其实是机器人的base坐标系(有些机器人的默认全局坐标系是和机器人base坐标系重合的,则也代表world全局坐标系,一般都认为是机器人的base坐标系,值都是 X0 Y0 Z0 A0 B0 C0); 在tool 内,表示tool【0】,代表的机器人第六轴末端法兰的坐标系,默认也是tool【0】={X0 Y0 Z0 A0 B0 C0}. 其他自定义的坐标系和工具都是分别向对于这两个来说的,这两个是无法修改的。 当你对机器人进行零点校准后,这两个值的参数会自动设为0了
关键字: KUKA 库卡 $nullframe

















 010-89755166转810
010-89755166转810


