加载中
首页
PQArt
PQFactory
PQFusion
MES
WMS
机器人
新闻动态
PQ经验
会员中心
关于
手机访问
登录
注册
离线编程技术介绍
离线编程是一种机器人编程方法,指的是机器人程序是独立于实际机器人单元创建的。然后,机器人程序将上载到实际的工业机器人上执行。
在离线编程中,机器人单元通过离线编程软件中的3D模型表示。
离线编程工具可大大提高机器人的编程效率和质量,降低机器人集成的成本,是工业机器人发展的重要关键技术。
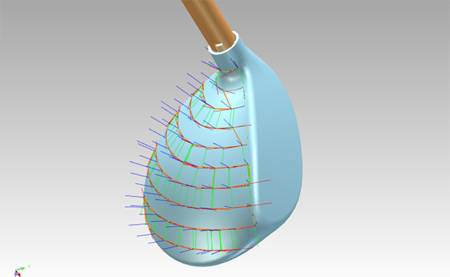
轨迹生成与编辑
九大类生成轨迹方式,上百个轨迹参数,数十个参数化轨迹修改方式,总有一款适合您!
可达空间
软件不仅可以计算机器人的法兰位置的可达空间,也可以计算机器人末端执行器的可达空间,让您的工作站设计和轨迹规划更加真实高效。
外部工具
机器人工作方式常见的有以下两种:
1. 手持工具,零件固定;
2. 手持零件,工具固定;
第二种成为外部工具,变成更复杂。PQArt提供了外部工具、变位工具、连续TCP、工件坐标系等配合使用,使手持零件不再复杂。
碰撞检测
仿真时,开启碰撞检测功能,可以模拟检测出机器人在运动时和周边的零部件、设施的碰撞情况,并通过高亮线和输出碰撞信息加以提示。
轨迹优化处理
可把轨迹中的奇异点、轴限位、不可达、碰撞等信息反映在界面上,通过鼠标拖动自动避让,快速获得理想轨迹,提高工作效率。
外部轴
通过外部轴联动的插值功能,用户可优化外部轴位置以实现沿整个刀具路径的平滑运动,而不需要手动修改每个机器人之间的目标位置控制点。
讲师介绍
宋智广
研发总监
北京华航唯实机器人科技股份有限公司
北京华航唯实机器人科技股份有限公司研发总监,PQArt离线编程软件开发负责人,擅长NURBS算法,几何拓扑控制算法与工业机器人控制算法应用。
何志勇
技术总监
北京华航唯实机器人科技股份有限公司
主要从事技术服务和职业培训,擅长工业机器人集成应用,培训课程设计,职业教育规划等,编写并出版多部工业机器人教材,开发并录制多门工业机器人网络课程。
张大维
培训部部长
北京华航唯实机器人科技股份有限公司
擅长工业机器人编程操作与工艺应用,长期从事工业机器人相关专业的职业技术培训,参与多本职业教育教材编著工作
龙涛
高级讲师
北京华航唯实机器人科技股份有限公司
擅长工业机器人离线编程及方案验证,在工业机器人离线编程轨迹规划及轨迹优化上有丰富的项目经验。
相关课程
010-89755166转810
 加载中
加载中













 010-89755166转810
010-89755166转810


